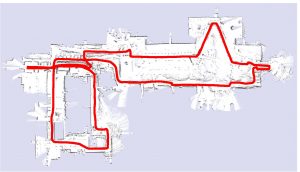
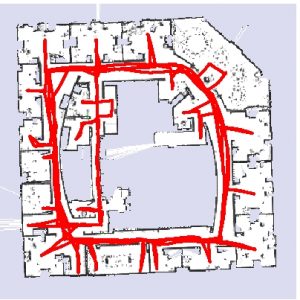
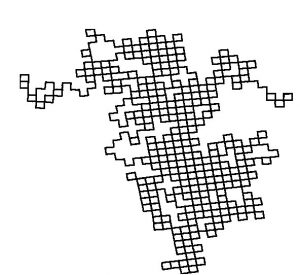
Datasets are described in the paper below. Click on the figure to download the corresponding dataset file in g2o format. Please cite the following paper when using the datasets:
![[PDF]](https://lucacarlone.mit.edu/wp-content/plugins/papercite/img/pdf.png) L. Carlone, R. Tron, K. Daniilidis, and F. Dellaert. Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization. In IEEE Intl. Conf. on Robotics and Automation (ICRA), pages 4597-4604, 2015.
L. Carlone, R. Tron, K. Daniilidis, and F. Dellaert. Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization. In IEEE Intl. Conf. on Robotics and Automation (ICRA), pages 4597-4604, 2015.
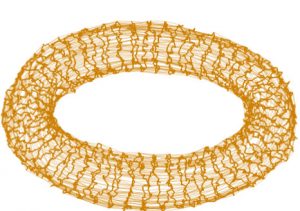
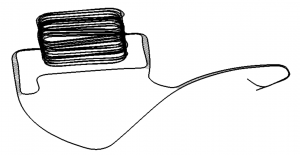
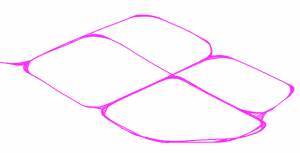
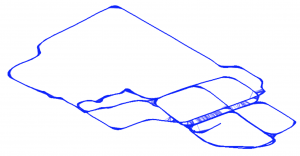
In the following paper, we replaced the covariances with isotropic ones in the datasets sphere, sphere-a, garage, cubicle, and rim:
L. Carlone, D. M. Rosen, G. C. Calafiore, J. J. Leonard, and F. Dellaert. Lagrangian Duality in 3D SLAM: Verification Techniques and Optimal Solutions. In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2015.