Would you like to learn about aerospace engineering and how to use extended reality (XR) technologies to fly an airplane, explore the surface of Mars, and design a space mission? Then join the new special subject “Aeroverse: Aerospace Engineering in XR”! Extended reality technologies are applied across aerospace engineering and related sectors. These technologies enhance the real world by superimposing digital information on the user’s view (augmented reality) and help immerse the user in a fully computer-generated 3D environment (virtual reality). In this class, students will be introduced to principles and applications of aerospace engineering through a series of challenges involving air and space, such as assembling and flying a jet plane, exploring the surface of Mars using remote-controlled and autonomous vehicles, and conducting operations in the International Space Station (ISS). Through these challenges, students will learn fundamental concepts in aerospace engineering. This first iteration of the subject will include only VR applications, using the Meta Quest 2 headset.

Luca Carlone
Associate Professor, Department of Aeronautics and Astronautics, MIT
Teaching
16.S684 - Aeroverse: Aerospace Engineering in Extended Reality (IAP 2024)

16.485 - Visual Navigation for Autonomous Vehicles (Fall 2023)

[Skydio R1 drone]
“Visual Navigation for Autonomous Vehicles” covers both theoretical foundations of vision-based navigation and hands-on experience on real platforms using ROS, the Robot Operating System. Lectures will explore fundamental tools and results from a wide spectrum of disciplines (optimization, estimation, geometry, probabilistic inference) that underlie modern techniques for real-time 3D computer vision (including visual-inertial navigation and SLAM), control and trajectory optimization, and machine learning. Students will be given a real platform (a mini racecar or a drone) and will be able to implement and test state-of-the-art algorithms and learn about the bleeding edge of autonomous navigation. The final portion of the class includes an individual or team-based project that has the goal of advancing the state of the art in vision-based navigation, according to students’ interest. Access online course material: https://vnav.mit.edu/
6.141/16.405j - Robotics: Science and Systems (Spring 2022)
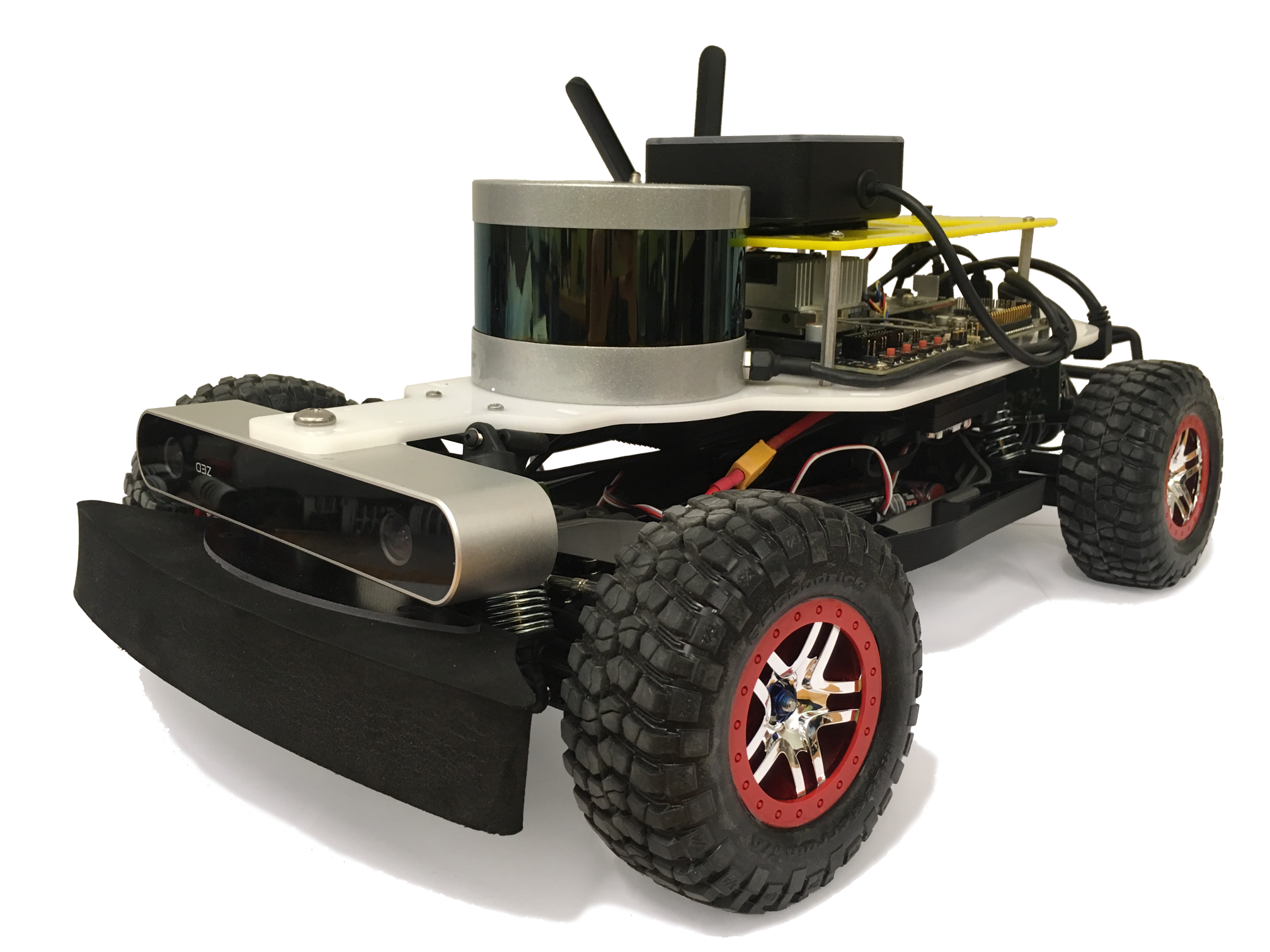
[RACECAR]
“Robotics: Science and Systems” includes both interactive frontal lectures and project-oriented labs. The lectures provide a comprehensive overview of mobile robotics and autonomous vehicles, covering topics in control and estimation theory, perception, computer vision, motion planning, and machine learning. The labs exercise these aspects through the design and implementation of algorithms and software to make the race car platforms fully autonomous. The labs are based on ROS, the Robot Operating System — a must-know for roboticists — which will be taught in the course.
16.485 - Visual Navigation for Autonomous Vehicles (Fall 2021)
[Skydio R1 drone]
“Visual Navigation for Autonomous Vehicles” covers both theoretical foundations of vision-based navigation and hands-on experience on real platforms using ROS, the Robot Operating System. Lectures will explore fundamental tools and results from a wide spectrum of disciplines (optimization, estimation, geometry, probabilistic inference) that underlie modern techniques for real-time 3D computer vision (including visual-inertial navigation and SLAM), control and trajectory optimization, and machine learning. Students will be given a real platform (a mini racecar or a drone) and will be able to implement and test state-of-the-art algorithms and learn about the bleeding edge of autonomous navigation. The final portion of the class includes an individual or team-based project that has the goal of advancing the state of the art in vision-based navigation, according to students’ interest.
6.141/16.405j - Robotics: Science and Systems (Spring 2021) - hybrid due to COVID-19

[RACECAR]
“Robotics: Science and Systems” includes both interactive frontal lectures and project-oriented labs. The lectures provide a comprehensive overview of mobile robotics and autonomous vehicles, covering topics in control and estimation theory, computational perception, computer vision, motion planning, and machine learning. The labs exercise these aspects through the design and implementation of algorithms and software to make the mini race car platforms fully autonomous. The labs are based on ROS, the Robot Operating System — a must-know for roboticists — which will be taught in the course. This year the race car scuderia will include cars equipped with the Puck VLP-16 Velodyne Lidar (http://velodynelidar.com/vlp-16.html), as well as other state-of-the-art sensors and embedded computers. The race cars will be provided to the students, who will focus on algorithmic aspects.
16.485 - Visual Navigation for Autonomous Vehicles (Fall 2020)
[Skydio R1 drone]
“Visual Navigation for Autonomous Vehicles” covers both theoretical foundations of vision-based navigation and hands-on experience on real platforms using ROS, the Robot Operating System. Lectures will explore fundamental tools and results from a wide spectrum of disciplines (optimization, estimation, geometry, probabilistic inference) that underlie modern techniques for real-time 3D computer vision (including visual-inertial navigation and SLAM), control and trajectory optimization, and machine learning. Students will be given a real platform (a mini racecar or a drone) and will be able to implement and test state-of-the-art algorithms and learn about the bleeding edge of autonomous navigation. The final portion of the class includes an individual or team-based project that has the goal of advancing the state of the art in vision-based navigation, according to students’ interest.
6.141/16.405j - Robotics: Science and Systems (Spring 2020) - virtualized due to COVID-19
[RACECAR]
“Robotics: Science and Systems” includes both interactive frontal lectures and project-oriented labs. The lectures provide a comprehensive overview of mobile robotics and autonomous vehicles, covering topics in control and estimation theory, computational perception, computer vision, motion planning, and machine learning. The labs exercise these aspects through the design and implementation of algorithms and software to make the mini race car platforms fully autonomous. The labs are based on ROS, the Robot Operating System — a must-know for roboticists — which will be taught in the course. This year the race car scuderia will include cars equipped with the Puck VLP-16 Velodyne Lidar (http://velodynelidar.com/vlp-16.html), as well as other state-of-the-art sensors and embedded computers. The race cars will be provided to the students, who will focus on algorithmic aspects.
16.485 - Visual Navigation for Autonomous Vehicles (Fall 2019)
[Skydio R1 drone]
“Visual Navigation for Autonomous Vehicles” covers both theoretical foundations of vision-based navigation and hands-on experience on real platforms using ROS, the Robot Operating System. Lectures will explore fundamental tools and results from a wide spectrum of disciplines (optimization, estimation, geometry, probabilistic inference) that underlie modern techniques for real-time 3D computer vision (including visual-inertial navigation and SLAM), control and trajectory optimization, and machine learning. Students will be given a real platform (a mini racecar or a drone) and will be able to implement and test state-of-the-art algorithms and learn about the bleeding edge of autonomous navigation. The final portion of the class includes an individual or team-based project that has the goal of advancing the state of the art in vision-based navigation, according to students’ interest.
6.141/16.405j - Robotics: Science and Systems (Spring 2019)
[RACECAR]
“Robotics: Science and Systems” includes both interactive frontal lectures and project-oriented labs. The lectures provide a comprehensive overview of mobile robotics and autonomous vehicles, covering topics in control and estimation theory, computational perception, computer vision, motion planning, and machine learning. The labs exercise these aspects through the design and implementation of algorithms and software to make the mini race car platforms fully autonomous. The labs are based on ROS, the Robot Operating System — a must-know for roboticists — which will be taught in the course. This year the race car scuderia will include cars equipped with the Puck VLP-16 Velodyne Lidar (http://velodynelidar.com/vlp-16.html), as well as other state-of-the-art sensors and embedded computers. The race cars will be provided to the students, who will focus on algorithmic aspects.
16.S398 - Visual Navigation for Autonomous Vehicles (Fall 2018)
[Skydio R1 drone]
“Visual Navigation for Autonomous Vehicles” covers both theoretical foundations of vision-based navigation and hands-on experience on real platforms using ROS, the Robot Operating System. Lectures will explore fundamental tools and results from a wide spectrum of disciplines (optimization, estimation, geometry, probabilistic inference) that underlie modern techniques for real-time 3D computer vision (including visual-inertial navigation and SLAM), control and trajectory optimization, and machine learning. Students will be given a real platform (a mini racecar or a drone) and will be able to implement and test state-of-the-art algorithms and learn about the bleeding edge of autonomous navigation. The final portion of the class includes an individual or team-based project that has the goal of advancing the state of the art in vision-based navigation, according to students’ interest.
6.141/16.405j - Robotics: Science and Systems (Spring 2018)
[RACECAR]
“Robotics: Science and Systems” includes both interactive frontal lectures and project-oriented labs. The lectures provide a comprehensive overview of mobile robotics and autonomous vehicles, covering topics in control and estimation theory, computational perception, computer vision, motion planning, and machine learning. The labs exercise these aspects through the design and implementation of algorithms and software to make the mini race car platforms fully autonomous. The labs are based on ROS, the Robot Operating System — a must-know for roboticists — which will be taught in the course. This year the race car scuderia will include cars equipped with the Puck VLP-16 Velodyne Lidar (http://velodynelidar.com/vlp-16.html), as well as other state-of-the-art sensors and embedded computers. The race cars will be provided to the students, who will focus on algorithmic aspects.